
About me
I am a graduate student in Control Science and Engineering at the School of Future Technology, Shanghai University. My supervisor is Professor Linqi Ye. In 2023, I completed my Bachelor's degree in Electronic and Information Engineering at the School of Communication and Information Engineering, Shanghai University.
I am a beginner in reinforcement learning for legged/humanoid robots.
Publications
2026

2025
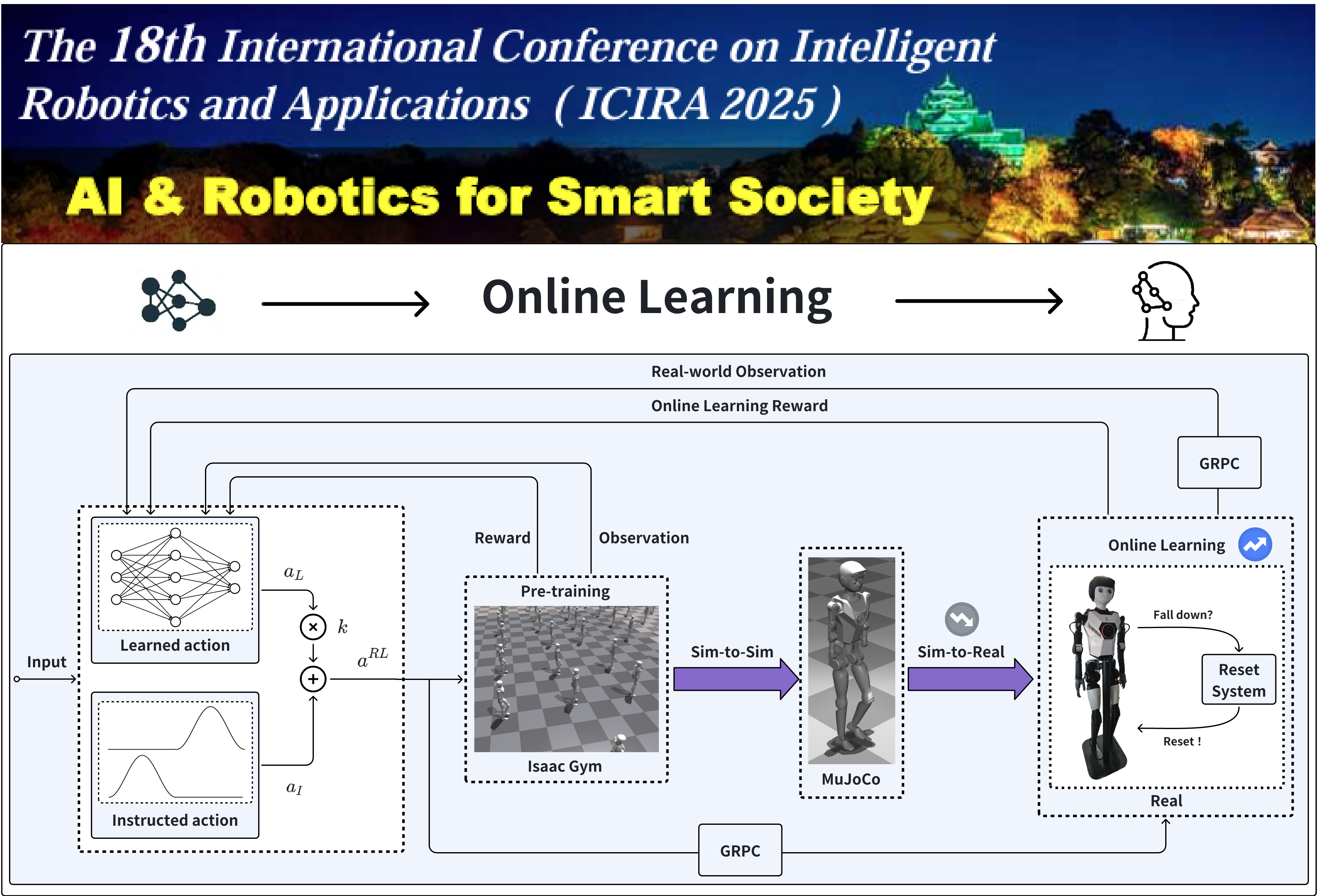
From Sim-to-Real to Learn-in-Real: Real-world Online Learning for Humanoid Robots
Rankun Li, Yuhang Xie, Linqing Zhu, Linqi Ye, Qingdu Li, Yan Peng
ICIRA, 2025, accepted
PDF | Springer Nature Link
Rankun Li, Yuhang Xie, Linqing Zhu, Linqi Ye, Qingdu Li, Yan Peng
ICIRA, 2025, accepted
PDF | Springer Nature Link
2024


2023
High-precision Trajectory Tracking Control for Uncertain Nonminimum Phase Hypersonic Vehicles
Rankun Li, Ting Wu, Linqi Ye
ONCON, 2023, accepted
PDF
Rankun Li, Ting Wu, Linqi Ye
ONCON, 2023, accepted
Internships
2025

2024

Shanghai Droid Technology Co., Ltd.
Bipedal Robot Motion Control Algorithm Engineer
2024.12--2025.3 | Web
Bipedal Robot Motion Control Algorithm Engineer
2024.12--2025.3 | Web